

基于MCU的權控智能節水系統設計實現
文章出處:http://www.katarog.com 作者:王志強 人氣: 發表時間:2010年11月06日
引言
隨著社會和經濟的不斷發展,環境和資源問題日益突出,預計到2020年,全國年總需水量將達到900億立方米,而缺水量也將達到150億立方米,水資源短缺已成為制約我國經濟和社會發展的重要因素,為此國家大力提倡節能減排,鼓勵節水、節能設備的研發。衛生間節水技術始于20世紀80年代末和90年代初期,在節水技術初級階段,普遍采用數字邏輯電路和模擬電子技術實現節水控制功能;自21世紀以來,衛生間節水技術開始采用先進的紅外檢測技術以及單片機控制技術,節水率有了較大的提高。目前衛生間節水設備存在諸多技術上的缺陷,即沖廁不及時,誤沖廁、漏沖廁現象頻繁,導致節水率低,環境衛生差。
為實現節約型、環保型社會,未來的衛生間節水設備必將朝著高節水率、環保、集成化、智能化方向發展。基于此,設計了一種基于統計學和模糊控制理論的權控智能節水系統。它利用改進的紅外檢測單元準確地采集數據;以AT89C2051單片機為硬件平臺構建信號處理、控制的主控制器,對檢測數據進行處理,并實時判斷出真實的人流量;注水分主注水和權控注水,保證主控制單元發出沖廁指令后能迅速沖廁。試驗結果表明,系統各項性能指標均達到設計要求,節水率提高到88%。
1 權控技術
為了確保主控制單元發出沖水指令后,水箱內的水能迅速瀉放,本節水系統采用了權控技術,權控沖廁功能由主注水、防滲漏控制單元、主控制單元等實現。主注水單元依據水箱低水位檢測器狀態判斷出水箱全空時啟動電磁閥,執行主注水至水箱總容量的95%時停止,為水箱的低水位。由于水中雜質經長時間的積淀以及水箱虹吸閥與水箱密封不嚴密,水過長時間停留會致使水位因滲漏而下降,鑒于此,設計防滲漏電路補注水,使水箱水位始終保持在水箱總容量的95%位置處。主控制單元實時處理入廁信息并發出權注水指令,這部分注水僅占水箱總容量的5%,耗時1~2 s。權注水后水箱內的水已充滿整個水箱,達到了虹吸閥開啟的位置,這種迅速沖廁的控制技術稱為權控技術。
2 系統硬件設計
本系統采用AT89C2051單片機作為系統的主控制單元,可實現紅外信號的處理、電磁閥權注水控制和LED顯示;結合C語言軟件編程,實現了與實際情況相吻合的沖水控制和兩級程序保密措施,豐富了系統功能,提高了系統的穩定性。
系統由主輔兩大控制單元組成,圖1為主控制單元結構圖,完成紅外信號處理,延時選擇并執行沖水子程序。其中,改進的紅外監測可感知移動生物,高水位可檢測水箱水位是否到達虹吸點,延時選擇是在入廁低峰期時供人工選擇延時沖水時間;LED可實時顯示主控制器工作狀態。
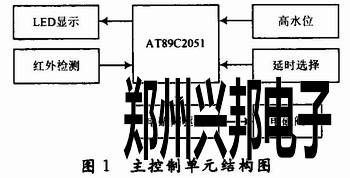
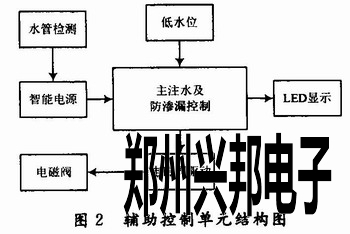
圖2為輔控制單元,完成無水斷電、主注水及防滲漏控制。當管網斷水時,低水位檢測水箱內始終無水,于是主注水控制電路一直開啟電磁閥,故設計智能電源在無水時斷開除水管檢測之外的所有電路電源。低水位檢測主注水是否到水箱95%,主注水控制單元據之控制電磁閥;防滲漏控制單元保持水箱在95%的水位。
2.1 智能電源設計
智能電源系統結構包括數字+5 V電源電路、模擬+5 V電源電路、無水斷電控制電路,系統結構框見圖3。
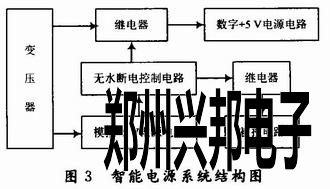
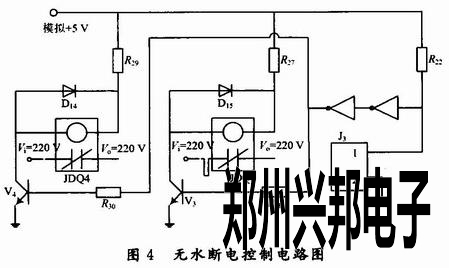
在無水斷電控制電路檢測到無水時,控制2個繼電器JDQ3,JDQ4斷開常閉觸點,切斷除水管檢測之外的所有電路供電,既保護了電磁閥,又節省了電能。在管網恢復供水后,無水斷電控制電路能瞬間迅速恢復電路供電,系統進入正常工作狀態,無水斷電控制電路圖見圖4。
2.2 紅外監測設計
紅外監測采用GH-718人體感應模塊感知生物體,輸出高電平。GH-718人體感應模塊有可重復觸發和不可重復觸發兩種觸發方式,為精確計算入廁人數,本系統設置成可重復觸發方式。但GH-718人體感應模塊的有效探測范圍為110°,探測距離最遠可達7 m,人體在這個區域移動時,造成同一入廁者有多次紅外觸發。為了將減少誤觸發,甚至使誤觸發降為零,本系統將GH-718人體感應模塊設置在機殼內,機殼底部居中開直徑為2 mm的圓孔。經過以上改進,紅外監測器僅在一根線上才感應移動人體產生紅外脈沖,極大地提高了監測精度,誤檢率降低到0.2%,見圖5。
2.3 主注水及防滲漏控制電路設計
主注水及防滲漏控制電路不受主控制單元控制,它通過低水位檢測裝置送來的高低電平判斷是否注水,主注水及防滲漏控制電路見圖6。
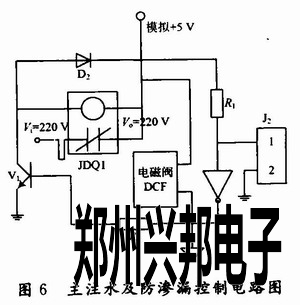
當水箱水位未到低水位時,低水位檢測裝置是低電平,經過一個非門后變為高電平,于是晶體管V1因飽和導通驅使電磁閥閉合進行主注水。當到達水箱水位時,水箱水位檢測裝置送來的是高電平,經過一個非門后變為低電平,于是晶體管V1截止,主注水控制電路關斷電磁閥停止主注水。
2.4 權注水控制電路設計
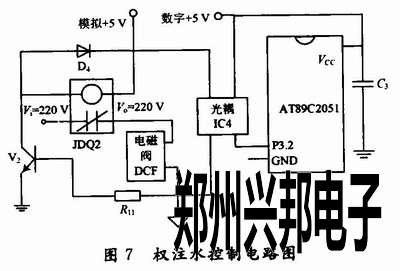
權注水是以AT89C2051為核心的主控制單元實現電路見圖7。權注水控制電路與微處理器耦合時采用光電耦合器耦合,優點是光電耦合器耦合可以阻隔繼電器和電磁閥開啟與關斷瞬間產生的尖鋒脈沖等干擾信號對微處理器的干擾,從而避免了主控制單元因受干擾而出現工作性能不穩定的現象,減小了誤沖廁和漏沖廁的幾率。信號流程為:權注水指令從P3.2口送出,經R8送光耦IC4驅動V2導通,控制繼電器閉合常開觸電,電磁閥開啟權注水。
3 系統軟件設計
本系統以AT89C2051單片機為核心,為實現單片機的信號處理和控制功能,將程序劃分為6個模塊:3 min定時模塊、紅外脈沖計數模塊、高低峰期判決模塊、延時選擇模塊、水位檢測模塊、電磁閥模塊,單片機主程序流程如圖8所示。
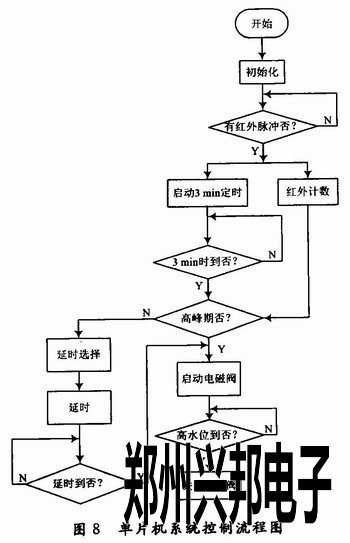
3 min定時模塊在紅外檢測經P3.1口送入第1個紅外脈沖時啟動,在3 min定時時間內由紅外脈沖計數模塊對紅外脈沖計數。3 min定時到時,3 min定時模塊和紅外計數模塊清零復位,此后3 min定時模塊和紅外計數模塊在下一個紅外脈沖到來時才再次啟動。同時紅外計數模塊的紅外脈沖計數值送高低峰期判決模塊。
高低峰期判決模塊有2個功能:當3 min內紅外計數值滿足高峰期人數時啟動電磁閥進行權注水;當3 min內紅外計數值不滿足高峰期人數時,啟動延時選擇模塊。
延時選擇設置有友好的人機對話接口,由延時選擇程序和設置在機外人工預置的7組機械開關共同組成實現,延時時間一到則開啟電磁閥進行權祝水。為了消除開關開閉產生的瞬間尖峰脈沖干擾紅外計數,在每組開關上設計了消尖峰脈沖電路。
水位檢測模塊檢測權注水是否到達虹吸閥的虹吸點,即高水位位置,當權注水到高水位時,水位檢測模塊啟動電磁閥模塊,使其關閉。
由于篇幅的原因,在此給出部分C語言源程序:
通過實際工作環境下的多次試驗,系統運行良好,紅外監測誤檢率小于O.2%,沖廁遲滯時間小于1 s。表1是本節水系統在檢測周期為3 min時的一年耗水量,以及與普通沖水器的耗水情況比較。
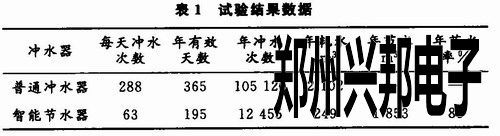
從表1可以看出,權控智能節水器在檢測周期為3 min的情況下,節水率高達88%,大大節約了水資源,符合設計初衷。
4 結語
提出的權控智能節水方案有效解決了現有節水產品沖廁不及時、誤沖廁、漏沖廁等技術缺憾,極大地提高了節水率,獲得了比較滿意的結果。隨著信號處理技術的發展,這種基于熱釋電紅外移動傳感器和單片微處理器的權控智能節水器將有著十分廣闊的應用前景。








